Watch This Penny-Sized Jumping Robot Right Itself Mid-Leap

Researchers discovered how springtails, animals about the size of a grain of sand, can hop away from predators and land smoothly on water.
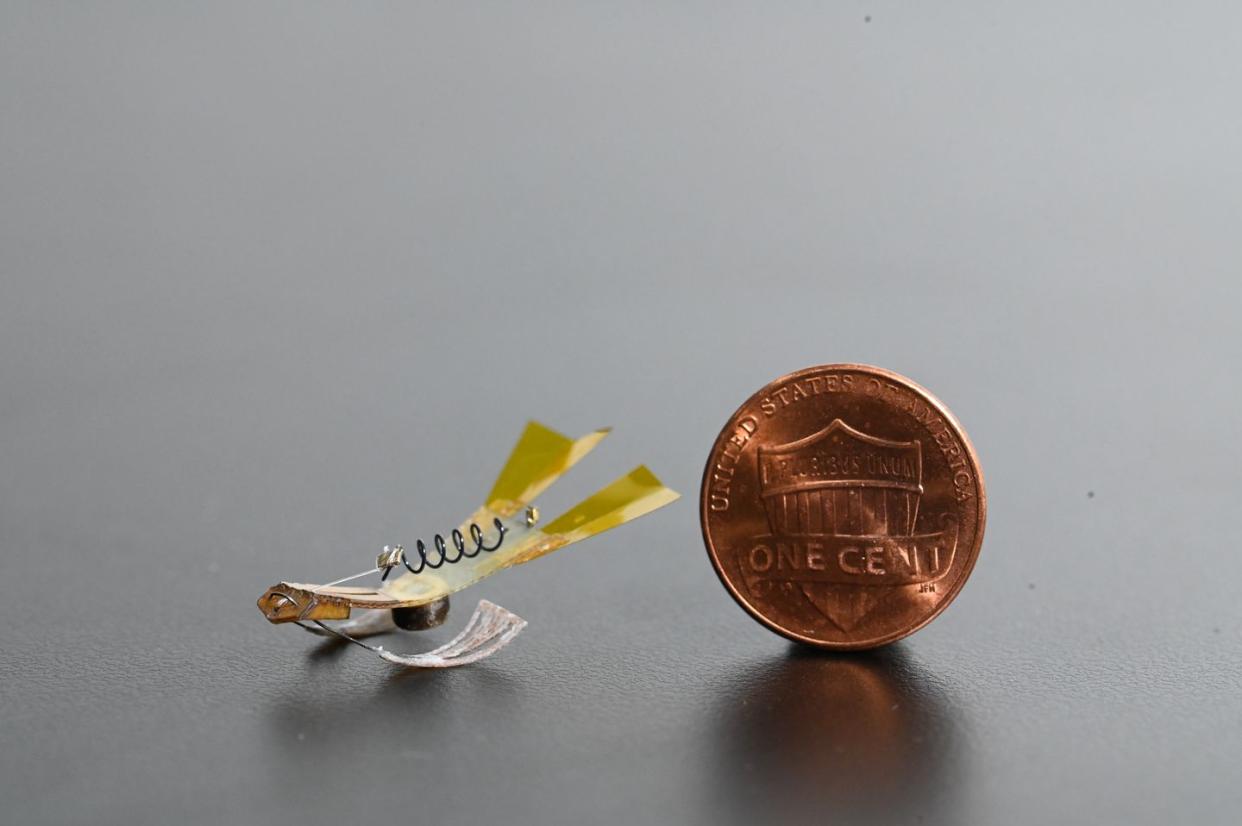
The team created a robot that mimics springtail jumping action, including self-righting in mid-flight.
This work could lead to better robots that can land safely on water and provide insights into the origins of flight in organisms.
The next time you’re near a pond or creek, bend down and take a closer look—you just might see tiny insect-like organisms, not much bigger than the width of a spaghetti strand, taking incredible leaps. These are springtails, little soft-bodied invertebrates with six legs and a weird bit of anatomy that protects them from predators everyday: a leaping organ on their undersides. When the springtail releases the organ, it slaps the water and propels the animal into the air up to ten times its height. It spins in the air to correct its position and lands smoothly back on the water, upright.
🤖 You love robots. So do we. Let’s nerd out over them together—join Pop Mech Pro.
A team of researchers at the Georgia Institute of Technology figured out the mechanics of springtail movement, from the jump, to the self-righting, and finally landing. They used a combination of modeling techniques and real springtail tests, and then they worked with researchers from Ajou University in South Korea to build tiny leaping robots that resemble the animals.
These experiments could advance multiple fields in engineering, including robotics and aerodynamics, Kathryn Dickson, a program director at the National Science Foundation (NSF), says in a Georgia Tech news release. The NSF partially funded the research, which the team published on November 7 in the Proceedings of the National Academy of Sciences.
“These extraordinary organisms with unique morphology live at a very precarious place: the water surface,” Saad Bhamla, a co-author of the study and assistant professor at Georgia Tech’s School of Chemical and Biomolecular Engineering, says in the release. “So, when they jump from and land back on water, we must understand the effects of both hydrodynamics and aerodynamics.”
The Inspiring Anatomy of These Tiny Leapers

Not only can a springtail adjust the angle of its leaping organ, the furcula, when it takes off, but it also lands on a tube-like appendage called a hydrophilic collophore, which holds water and adheres to surfaces, allowing the animal to stick its landing. While in the air, the springtails curves into a U-shape that generates aerodynamic torque, a force that causes its body to rotate about its own axis until it is right-side up. This self-righting happens just 20 milliseconds into the jump—faster than any other wingless organism can do it.
“The big surprise to me is to imagine an animal the size of a sand grain capable of controlling all jumping stages, from takeoff and mid-air righting, to landing and adhesion on the water surface. All this happening in less than a blink of an eye,” co-author Victor Ortega-Jiménez tells Popular Mechanics in an email. Ortega-Jiménez was at Georgia Tech during this research and recently joined the School of Biology and Ecology at the University of Maine as an assistant professor.
Mimicking Springtail Mechanics in the Lab
The team took inspiration from springtails’ natural ability and created a mathematical model of the physics involved in their movements, including surface tension, inertia, buoyancy, drag, capillary dissipation, and adhesion forces. They calculated how the springtail creates stable landings that release energy through ripples on the water’s surface. The team discovered that springtails can control their takeoff angle and speed. They incorporated this information into a mathematical model.
Their resulting computer simulation shows that the angle of the body is key to landing smoothly and gliding on the collophore, which collects a droplet of water to ensure a stable ride. “Nobody has ever shown experimentally what the collophore is really for, and we’re showing that it’s for their survival,” Ortega-Jiménez says in the news release. “They need this for stability, controlling their takeoff, but more importantly how to perfectly land like an acrobat.”
Next, the team placed real springtails, both living and dead, in a wind tunnel, and dropped them in a free-fall. As in their model, they found that the magic combination for a bump-free landing involved the animals’ U-shaped posture and landing on the collophore. The wind tunnel and the freefalls didn’t alter their performance.
Robotic Springtails Show Small-Scale Control
Using the experimental models and the data from the real springtails, the Georgia Tech researchers collaborated with Je-Sung Koh and his team at Ajou University to design and build a small aerodynamic jumping robot with a similar lowered center of gravity. But these early robots spun too much and couldn’t land right side up.
So the next robot had drag flappers, attachments to the main body that reduced its rotation. Now it could land on its feet. When they put these modified robots through their paces, the team confirmed that a collophore and body shape are necessary to land.
Even though they achieved stability, the robots weren’t quite as adept as the springtails, reaching a 75 percent success rate compared to the springtails’ 85 percent rate of perfect landings during tests.
However, this research has implications for understanding bodily control at small scales. “There is a belief that because they are tiny, they don’t have as much control as big animals do,” Ortega-Jiménez says in the release. “So, we are opening some possibilities of control at this small scale that could give insights into the origins of flight in organisms.”
He hopes to delve further into the hydrodynamics and wave production of semi-aquatic springtails as they jump and land on the water’s surface. Another next step is to investigate the responses of springtails when confronted by natural predators, and to “design a flexible jumping robot that can deform its body and adhere to the surface,” Ortega-Jiménez tells Popular Mechanics.
Researchers say their findings “could inspire insect-scale jumping robots that are able to land safely and expand the capability of robots in new terrains, such as the open-water surfaces in our planet’s lakes and oceans.”
You Might Also Like
