Scientists Are Using Dead Spider Legs as Gripping Claws. Thanks, We Hate It!
"Hearst Magazines and Yahoo may earn commission or revenue on some items through the links below."
Hydraulic pressure controls spider leg movements, allowing the arachnids to straighten and curl their legs while walking.
Engineers mimicked the liquid pressure using air to control spider legs.
A dead spider’s legs have great gripping power, making them ideal “micromanipulators” for capturing small, live specimens.
When a spider crawled into the corner of a research lab at Rice University in Houston, Texas and curled up to die, it surely never imagined that it would become the inspiration for researchers’ mad idea to make a spidery set of mechanical grippers.
It started out innocently enough. Faye Yap, a mechanical engineering graduate student, and her adviser, Daniel Preston, saw the spider and speculated about why a dead arachnid’s legs bend inward and remain that way. They learned that spider corpses lack the hydraulic pressure of the fluid that pumps into living spiders’ legs to straighten them out.
Spiders have flexor muscles that contract their legs inwards. When a spider wants to straighten its legs to move, the prosoma section (where its legs attach to its body) ejects fluid into the legs, pushing them out straight. Valves in the spider’s body open and shut, depending on how each independent leg needs to extend and retract—and voilà, you have a walking spider. Once it’s dead, though, there’s no more liquid pressure to uncurl the legs.
Soon, the gears started turning in the mechanical engineers’ minds; they wondered if they could use air as a substitute for a spider’s natural fluids to make the legs move again. The idea didn’t seem too odd, since Preston’s research group focuses on soft robotics, an area of study that uses nontraditional, softer materials like hydrogels, elastomers, and textiles, Preston tells Popular Mechanics in an email. “Biotic materials, in this case inanimate spiders, fit within this scope.”
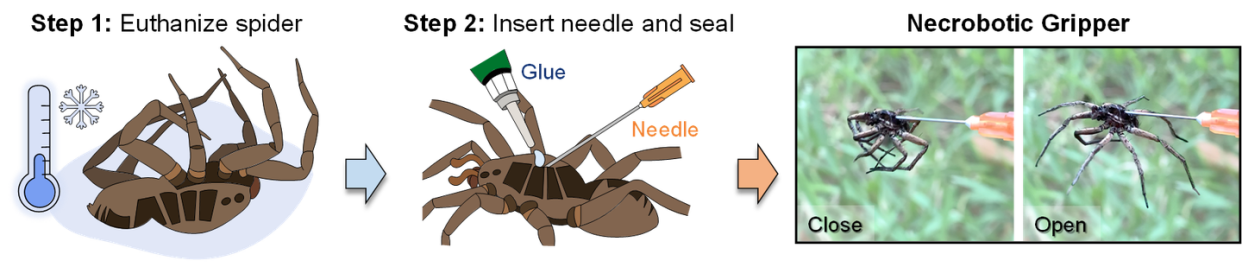
For their experiment, Preston, Yap, and other students on the team used a thin needle to inject air into a dead wolf spider’s prosoma. When inserted at just the right spot, their method worked instantaneously, uncurling all of the legs at once. Then, they tried using the spider—which tends to be about 1 to 2 inches wide, including the legs, to pick up various items of different sizes and weights, like a dice-sized cube, a circuit board component, and even another larger spider.
It turns out that their spider gripper could lift 130 percent of its own body weight, and it could open and close 1,000 times. “We were surprised by the simplicity of the fabrication process and the effectiveness of the necrobotic gripper,” Yap tells Popular Mechanics in an email. The team was also intrigued by how fast the legs could pop open.
Creating new grippers from more dead wolf spiders was a pretty quick procedure.
“The entire process, from inserting the needle to the setting of the glue to create a fully operational gripper, can be performed in approximately ten minutes,” the engineers wrote in a new paper about their necrobotic gripper, published in the journal Advanced Science on July 25.
The team used other spiders too, including the giant Goliath spider, also called the “Goliath birdeater.” (It usually eats insects, but smaller amphibians and rodents are also on the menu). It weighs up to six ounces and is the biggest spider in the world, with a leg span of up to one foot. This tarantula is native to the Amazon Rainforest, but Preston’s team ordered theirs from a biological supply company. Surprisingly, these huge arachnids were only able to lift objects that were one-tenth their body weight. Conversely, the tiny jumping spiders, which range from slightly smaller than a sesame seed to barely an inch wide, had enough gripping power to lift two times their body weight.
Next, the team would like to figure out how to operate the gripper’s legs independently, and further study the locomotion and gait of arachnids, Preston says. “We also plan on adding thin polymeric coatings to prolong the lifetime of necrobotic devices.”
Because of its natural camouflage, a spider gripper could be used to capture small live insects and other specimens for study, with the added benefit that this soft grip wouldn’t damage them, Yap says. The team performed a mathematical scaling analysis to figure out how effective really small necrobotic grippers would be. It’s likely that they would work well as “micromanipulators,” since they can hold objects with a significantly greater mass than their own, Preston explains.
A gripper created from the spider body would be sustainable too, because it comes from a natural, biodegradable source and uses very few resources, the team says.
“We hope that our work will inspire people to pursue their curiosity about natural phenomena, and that this new field of ‘necrobotics’ will spark ideas for how we can respectfully and sustainably source and utilize biotic materials for robotics applications,” Preston says.
You Might Also Like
